|
|
|
HOME 제품소개카프링Rubber Coupling 제품소개카프링Rubber Coupling |
|
| Rubber Coupling |
|
| |
| DIMENSION 보기 |
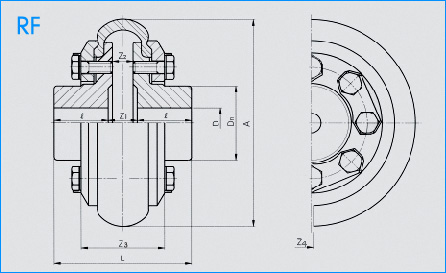
 RF RF |
|
|
 |
|
| |
 |
특징 |
|
1. 축의 편심.편각을 광범위하게 흡수할 수 있습니다.
2. 구조가 간단하여 장착이 쉽고 고무의 분해시 관련 기기의 분해나 이동이 필요없습니다.
3. 윤활이 필요없습니다.
4. 충격완화, 진동흡수가 우수합니다.
5. 소음이 전혀 없습니다. |
| |
 |
|
|
 |
|
| |
 |
1. 플랜지①에 압축링② 를 볼트④로 헐겁게 끼웁니다. (그림4)
2. 편심 및 편각과 플랜지 간격 (Z2)은 커플링 규격에 따라 표1의 값으로 맞춥니다. (그림4)
3. 고무③을 플랜지①과 압축링 사이에 끼웁니다. (그림5)
4. 고무 원주상의 간격 (Z4)은 커플링 규격에 따라 표1의 값으로 맞춥니다. (그림6)
5. 압축링②를 볼트④로 체결합니다. 이 때 볼트를 서로 교차로 체결하여 균일한 압축력이 고무측면에 걸리도록 합니다. (그림7)
6. 볼트 체결 정도는 플랜지① 보스외면의 "A"단과 압축링②의 측면이 동일하게 되기까지는 균일하게 죄어줍니다. (그림8)
7. 볼트가 풀리지 않게 로킹플레이트⑤를 구부립니다. (9그림) |
| |
| 규격 |
RF100~RF180 |
RF210~RF310 |
RF400~RF450 |
RF550~RF700 |
| Z4 (gap) |
1~2 |
1~3 |
2~4 |
3~6 |
|
| |
|
|
| |
|
| |
|
RF Dimension |
|
| 규격A |
허용토오크(kgf · m) |
최대회전수(rpm) |
Bore Dia. D |
Dimensions (mm) |
GD²
(kgf · m² ) |
중량(kg) |
| Min. |
Max. |
Dn |
ℓ |
Z₁ |
Z₂ |
Z₃ |
| 100 |
3 |
4,000 |
10 |
22 |
36 |
66 |
26 |
10 |
40 |
8.7416X10 |
1.21 |
| 135 |
8 |
4,000 |
16 |
30 |
48 |
90 |
35 |
14 |
53 |
3.8416X10 |
2.87 |
| 180 |
15 |
3,000 |
23 |
35 |
64 |
120 |
46 |
20 |
70 |
0.015 |
6.38 |
| 210 |
30 |
3,000 |
28 |
50 |
76 |
143 |
54 |
27 |
83 |
0.031 |
9.40 |
| 265 |
75 |
2,000 |
33 |
60 |
95 |
178 |
67 |
32 |
105 |
0.101 |
19.0 |
| 310 |
125 |
2,000 |
36 |
70 |
112 |
208 |
75 |
36 |
121 |
0.223 |
31.0 |
| 400 |
275 |
1,600 |
40 |
85 |
145 |
270 |
100 |
44 |
153 |
0.791 |
70.0 |
| 450 |
500 |
1,250 |
55 |
100 |
165 |
300 |
110 |
50 |
171 |
1.391 |
101.0 |
| 550 |
1,000 |
1,000 |
90 |
130 |
200 |
365 |
130 |
53 |
196 |
3.773 |
170.0 |
| 700 |
2,000 |
800 |
100 |
160 |
255 |
460 |
165 |
70 |
256 |
12.544 |
358.0 |
| 950 |
5,000 |
600 |
125 |
225 |
345 |
610 |
220 |
82 |
372 |
68.098 |
950.0 |
|
| |
| ※ 주의사항 |
1. 고무는 직사광선을 피하는 것이 좋습니다.
2. 옥외에서 사용하거나 안전이 요구되는 곳에서는 커버를 사용합니다.
3. 고무는 기름이나 그리스류에 접촉되지 않도록 특별히 주의해야 합니다.
4. 다음과 같은 경우의 사용시 상담하여 주십시오.
- 커플링이 기름에 접촉할 가능성이 있을 경우
- 주위온도가 -30℃ ~ 60℃ 를 벗어나 사용하는 경우 |
|